The most natural sound.

Semi - Omnidirectional sound
Without loss of pinpoint focus

Ilumnia LEMS driver
One of world’s most advanced electrodynamic driver

Adjustable balance
Adjust your tweeter frequency

Stacked plywood design
A piece of craftsmanship of the highest order

Directional tweeter
A directional soft dome silk tweeter

External high-end current supply
An electromagnetic field fed by the power supply

Adjustable bass tuning
Adjust bass according to your own preference
The driver
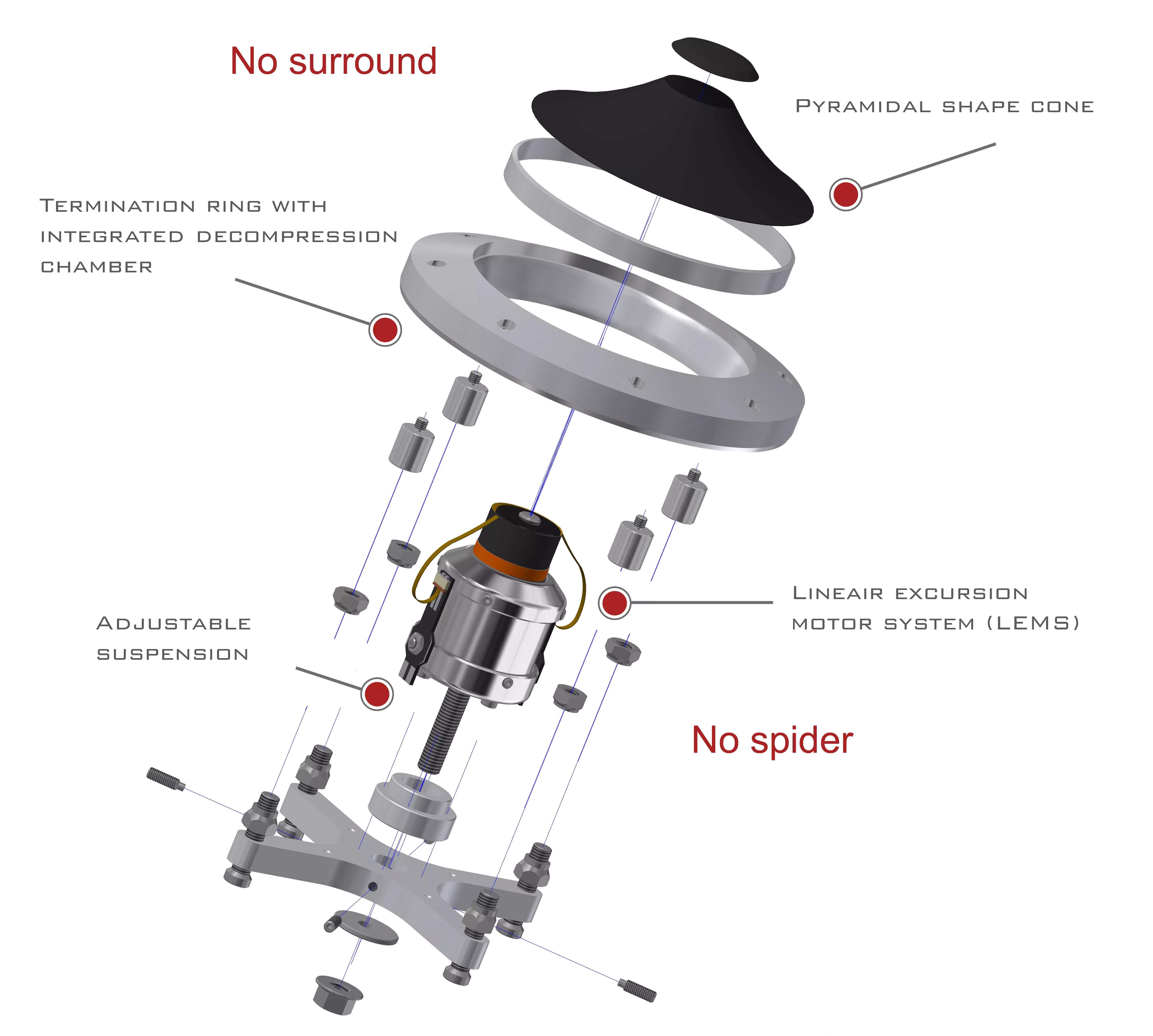
There was only one way to meet these challenges and surpass the best loudspeakers in the world and that was to design a completely new driver principle. A design in which those loudspeaker components were omitted that cause the most problems in dynamic loudspeakers: the spider (centering ring) and the surround (the mostly rubber suspension). This “simply” amounted to the realization of a floating cone.
The goal was that 100% of the amplifier signal (musical signal) would actually reach the cone – and only the cone. In this way, even the smallest signal (micro detail) would be translated into a movement of the cone and at the same time an ultra-fast reproduction of large signals (macro dynamics) would take place. We call this design principle: “energy-to-movement ratio”
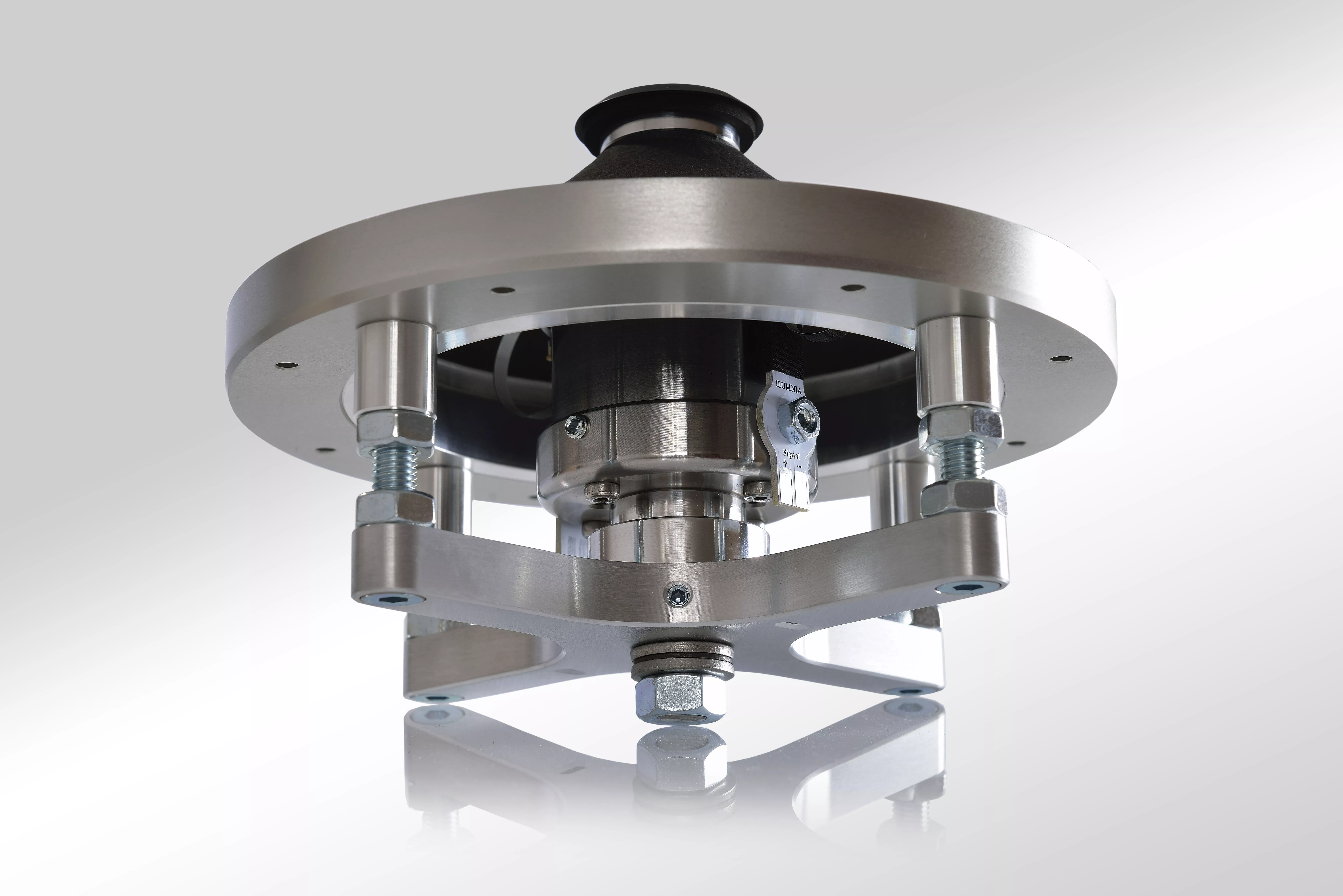
This goal was achieved by our unique, patented Ilumnia LEMS driver with the world's first floating cone.
THE TECH
A floating cone
The Ilumnia LEMS driver contains no less than 69 parts, which enable the floating cone principle, of which the Linear Excursion Motor System (LEMS) forms the core. This engine does two things. On the one hand, it creates the controlled magnetic field and continuously keeps the pyramid-shaped cone in the right place. On the other hand, it transmits the music signal, as in any other driver. Both functions are completely galvanically isolated from each other.
The separate decompression chamber in combination with an aluminum ring, which is glued to the cone with a minimum tolerance of 0.03mm, ensures that the usual under- and overpressure is neutralized when the cone moves. This eliminates all resonances, distortion, energy absorption and non-linear behavior that occur with “normal” dynamic drivers.
To minimize the usual Doppler effect of mid-bass drivers radiating straight ahead, the driver is also mounted at an oblique angle upwards in the cabinet. With the Ilumnia Magister this angle is optimized at 9 degrees and with Ilumnia Vocalis at 13 degrees.
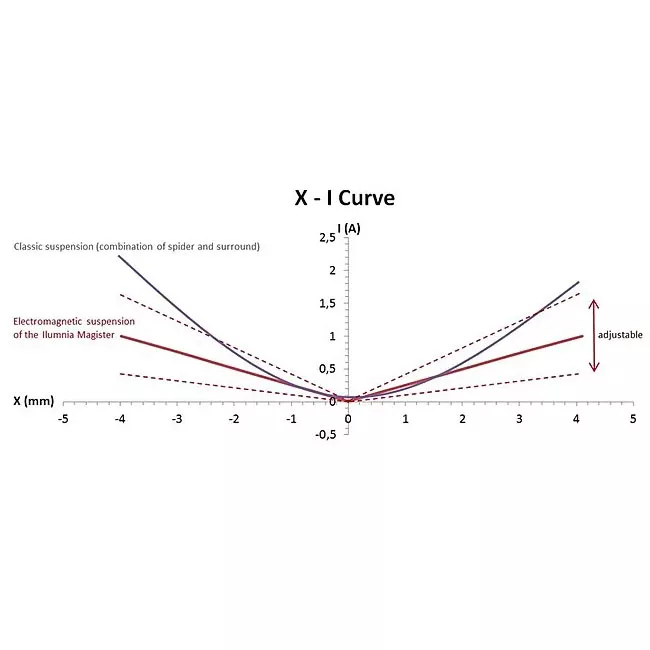
In addition to the mechanical issues of traditional dynamic drivers, there is also an important electrical issue that we call dynamic compression. This is caused by the decreasing energy of the motor when the cone is deflected farther (at higher volume). Ilumnia has solved this by making the suspension coil in the motor variable (which is possible with an electro-magnetic suspension), so that the grip of the motor on the cone and thus the correct energy transfer can be continuously optimally adjusted. This results in maximum (99.7%) linearity and thus minimum compression. So the sound always remains effortless and free. With the Magister, the ideal damping factor for each type of amplifier can be fine-tuned even further via the separate power supply (loose cone for transistor amplifiers and tight for tube amplifiers).
Lightweight paper is used as the cone material. This was easy now that the cone would no longer experience any mechanical resistance from the suspension and the centering ring. The lighter the cone material, the less energy is lost from the music signal.
The cone size of 8inch/15.5cm gave the best ratio between speed and displacement.
An important additional advantage is an easy and relatively inexpensive replacement of the cone in the event of accidental damage. Damage from overload will not happen quickly and overload will be audibly and visibly announced by the cone hitting the neoprene damper. This will only happen with a load of approx. 200 Watt. The cone has a free deflection of no less than 8mm.
TECHNOLOGY
Speaker technology
Unique amplifier matching
Ilumnia Magister is the only loudspeaker in the world that can be tuned to the damping factor of the amplifier. This is an important additional and unique advantage of the electromagnetic suspension of the cone. The damping of the stiffness of the suspension of the cone is adjustable by the user in 5 positions on the supplied power supply. Position 3 for most solid state amplifiers, position 4 for a class A triode tube amplifier and position 5 for a 300B amplifier. In particular, an optimally guaranteed, tight and extremely defined bass reproduction (below 150Hz) is the result.
In all other dynamic loudspeakers, this damping is activated automatically (but also unintentionally and in a sense uncontrolled) by the presence of mechanical parts such as spider and surround, so there is nothing to tinker with or adjust.
It’s often said that an amplifier and speakers don’t always make the perfect match, prompting users to replace one or the other. At Ilumnia, we’ve eliminated this problem once and for all.

curve
The results
- Almost completely (99.7%) linear behavior of the cone at any volume and dynamics in the music.
- This means completely (99.7%) compression-free reproduction.
- Ultra-fast rendering while retaining all micro and macro dynamics and details.
- No mechanical distortion and resonances.
- Minimal presence of Doppler effect due to the oblique placement of the cone.
- The spatial sound characteristics of an omnidirectional radiator combined with the placement of a point source by placing the tweeter exactly above the center of the cone.
- Deep and undistorted bass reproduction from a relatively small driver due to the lack of mechanical (and electrical) resistance.
- Perfect automatic adjustment to damping factor - with Magister even further adjustable to the type of amplifier.
- Completely neutral and natural sound without the occurrence of listening fatigue.